Here was the starting point of my adventures in building quadcopters - v1.
The frame is 3D-printed, based on the MHQ2 design at http://www.hovership.com/, at a 60% fill rate to ensure that the parts do not break too easily. 10% was definitely not strong enough, especially for the landing gear!
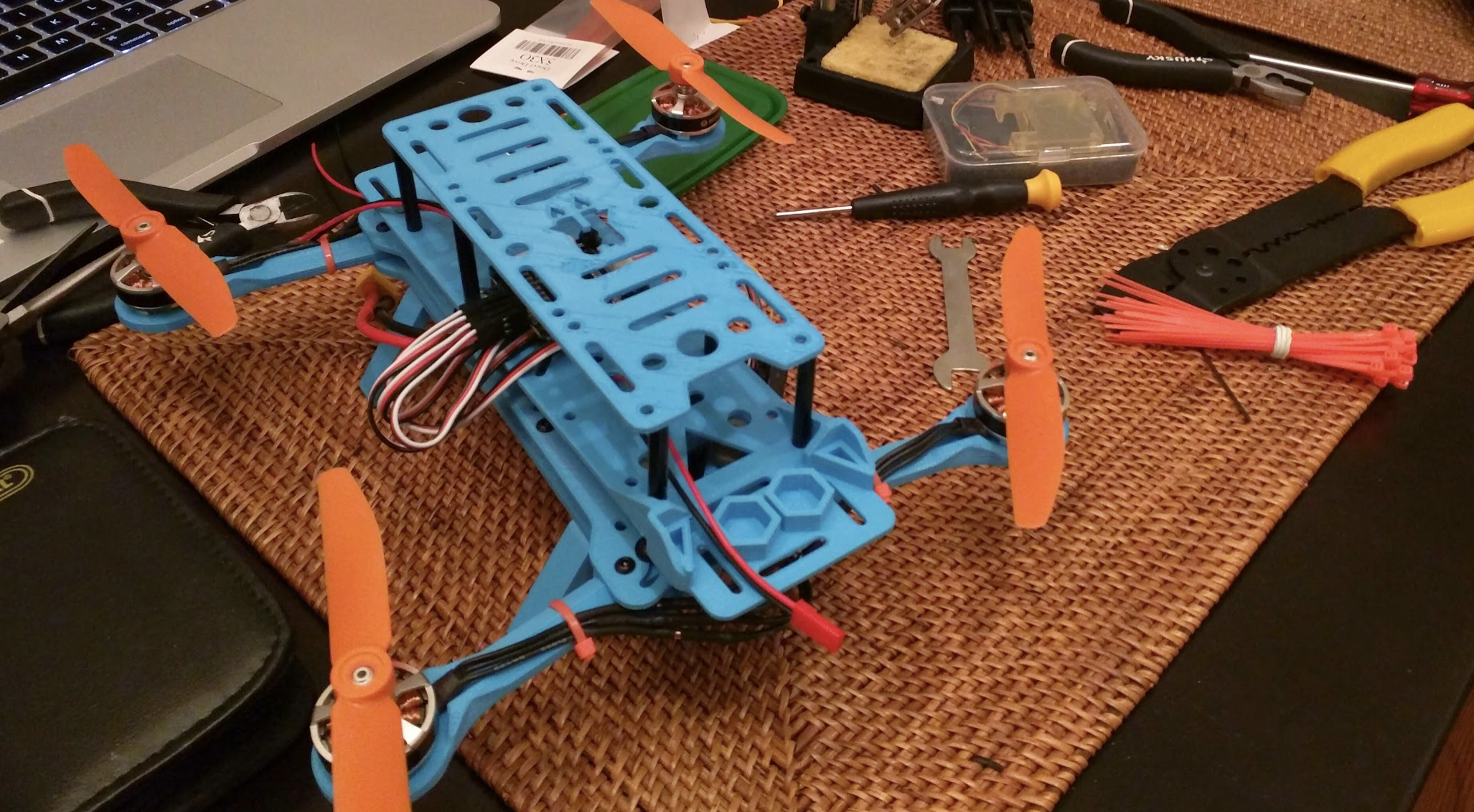
And below ith a few more components mounted - battery and antenna. The components were sourced from various vendors, in particular the most excellent Mobius ActionCam for first-person view, and a Naze32 flight controller with barometric sensor.
Finally ready to fly - after adding a first-person view camera for FPV flight.

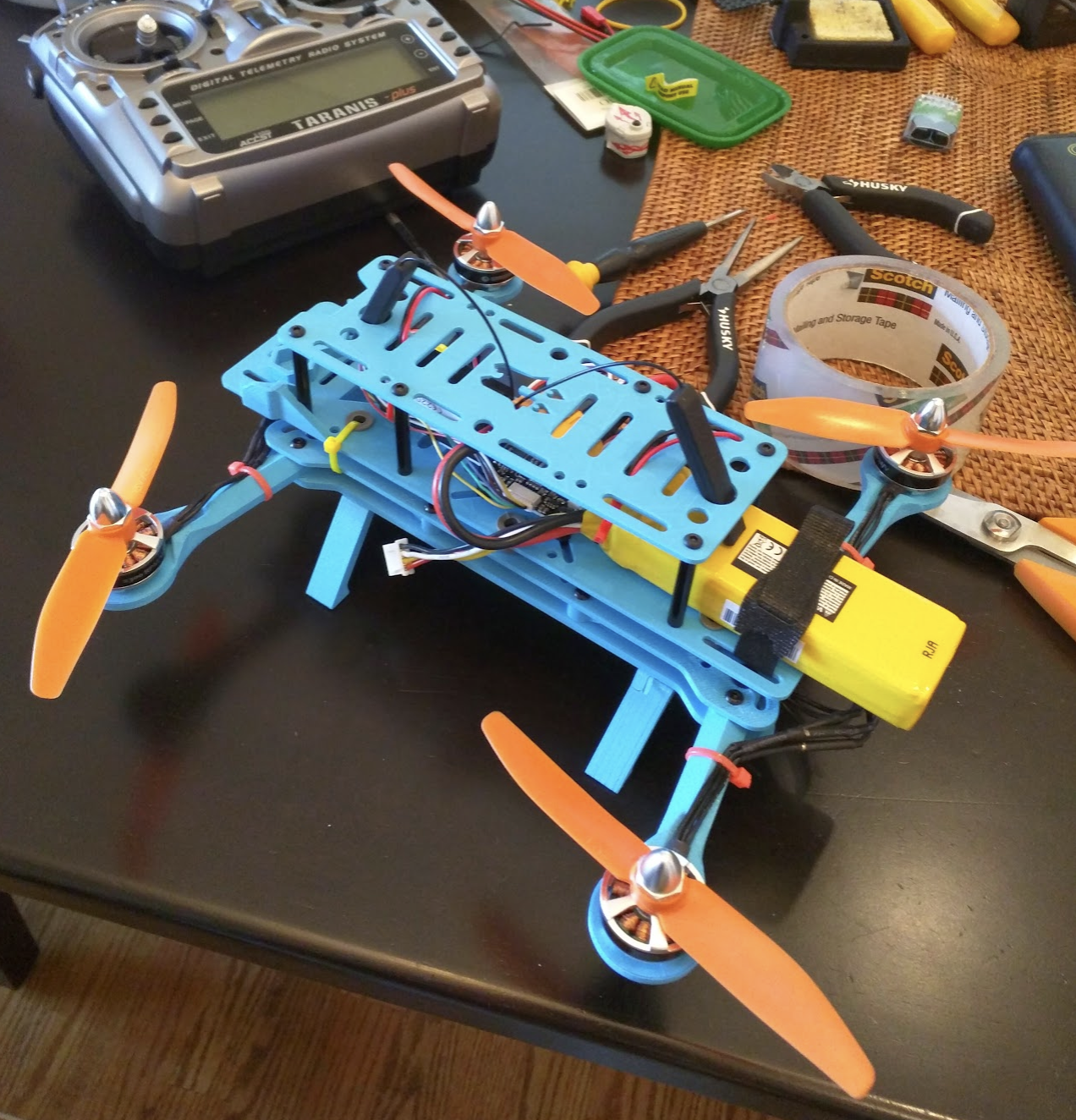
A few flights, lost blades and broken parts later… we come to the second iteration of home-built quadcopter. The first one was good, but a bit difficult to control, in particular to keep the drone stationery on windy day.
This time I used beefier motors, wider blades, a better flight controller and cleaned up the placement of the various components to avoid tangled wires. The result is quite impressive - it is fast. Definitely too fast for my limited piloting skills!

It still needs some tuning to hover more reliably throughout a battery charge. It is fairly stable midway through, but much harder to control at the start and the end of the flight.
Last modified on 2015-09-07